前言
一、患者基本信息
主诉:PSA升高1月余。
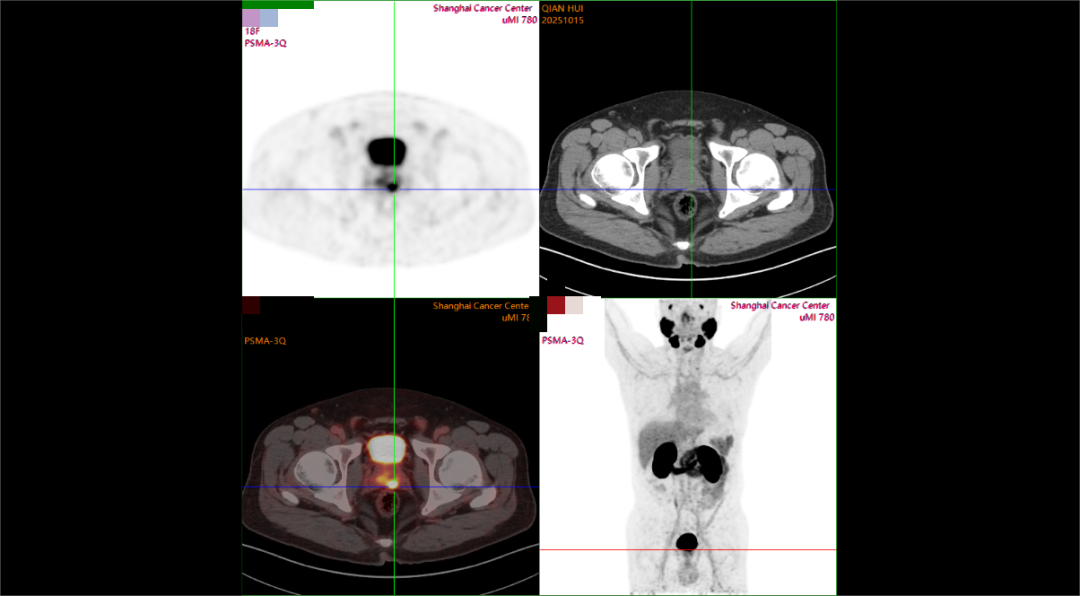
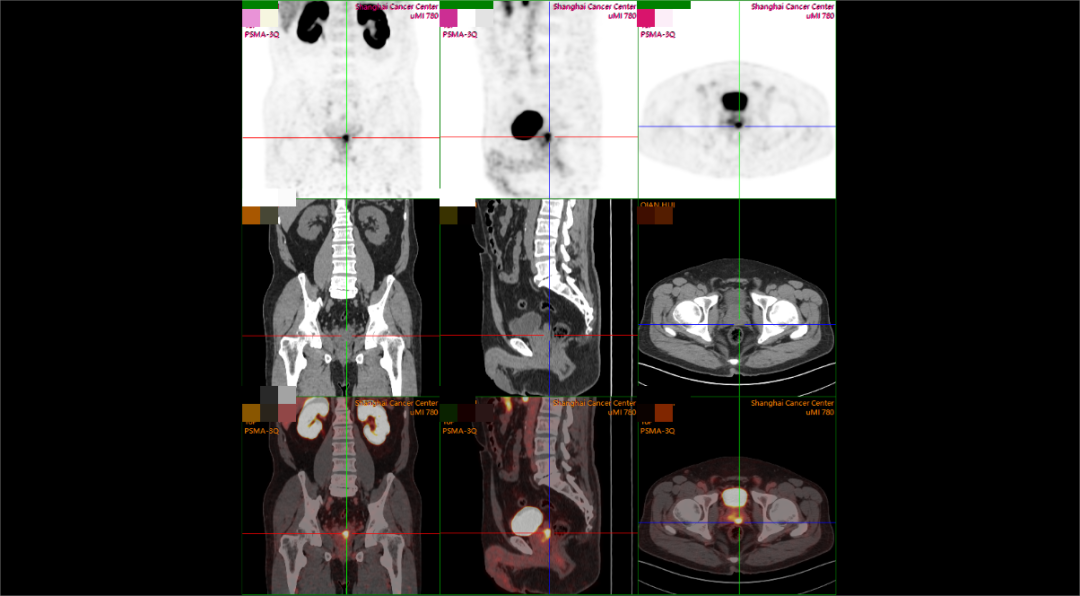
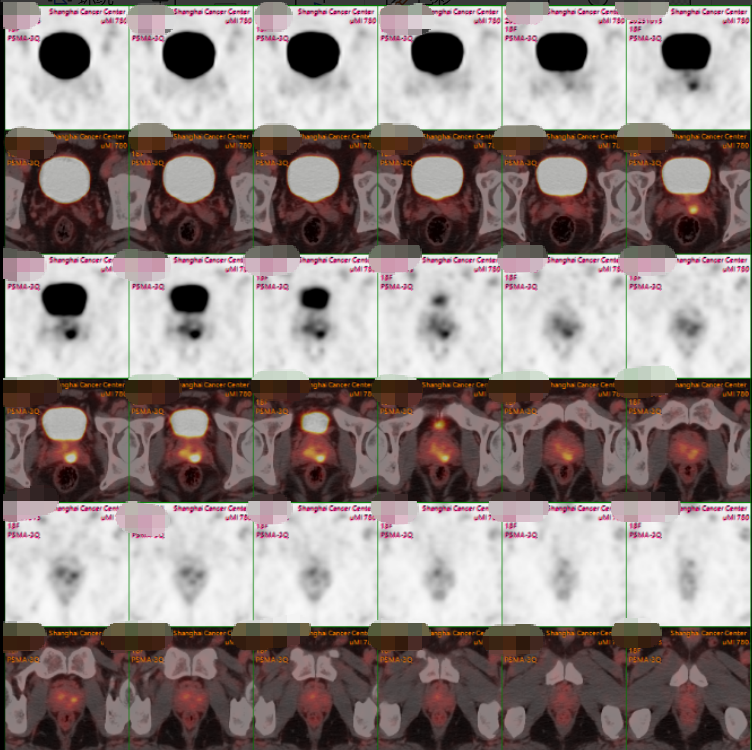
现病史:患者PSA 两年来持续升高,2025年10月PSA:8.68,外院MRI:pi-rads 2分。2025年10月10日我院穿刺,前列腺腺泡腺癌,Gleason评分:3+3=6,现为进一步诊疗入院。病理报告(2025.10.10):前列腺腺泡腺癌,GIeason评分:3+3=6 ;lSUP分组:1累及组织约20%;核医学报告(2025.10.16):前列腺形态欠规则,体积正常,最大横截面约4.6*3.6cm,左侧外周带PSMA摄取增高灶。
发病来一般情况:精神状态佳,食欲可,睡眠良好,无
既往史
传染病史:无;
预防接种史:按计划预防接种;
手术外伤史:无;
系统回顾
呼吸系统:无特殊;
循环系统:无特殊;
消化系统:无特殊;
泌尿生殖系统:同现病史;
血液系统:无特殊;
内分泌系统:
神经精神系统:无特殊;
运动骨骼系统:无特殊;
个人史:出生并生长于原籍,无疫区接触史,无有毒有害物质接触史,无不良嗜好;
婚育史:已婚;
家族史:否认家族性及遗传性疾病史。
临床诊断:前列腺恶性肿瘤,糖尿病。
二、手术经过
2025.10.17我院行后入路机器人辅助腹腔镜下前列腺癌根治术。
病灶描述:前列腺约4*4*3cm,包膜精囊输精管尚完整,与直肠表面未见明显纤维性粘连。双侧盆腔未见肿大淋巴结。
手术经过:麻醉成功后,取平卧位,臀部垫枕头。常规消毒铺巾。肚脐上2cm处行1cm左右长度的切口,切开皮肤、浅筋膜,腹直肌前后鞘,进入腹腔。在该切口置入第一个trocar。建立气膜后,在直视下分别在第一trocar左右各旁开6cm处置入第二和第三trocar。在第二和第三trocar左右旁开6cm处置入第四及第五trocar。第一trocar左后方置入第六trocar。建立气腹腔后,在直视下使用百科钳和超声刀分离,经道格拉斯窝上方切开腹膜,进入膀胱直肠间隙。锐性分离该间隙,切断输精管,提起精囊腺暴露出前列腺底部。逐步游离前列腺,切开膀胱颈尿道,分离前列腺两侧面到达前列腺尖部处,切断尿道。过程中仔细保留双侧血管神经束。以3-0可吸收线将尿道和膀胱颈部吻合,采用连续缝合法。置入F22foley三腔导尿管,气囊注水20ml。留置左右侧的盆腔
三、术后病理
病理:
(前列腺根治)前列腺腺泡腺癌,Gleason分级评分:3+4=7,ISUP分级分组:2组,瘤荷:约1%;
癌累及近尖部,前列腺被膜外扩散EPE(-);
左精囊腺(-),右精囊腺(-);
神经侵犯(-),脉管侵犯(-);
标本各切缘均未见癌累及。
专家点评
今天很荣幸能带来一台我做的“后入路机器人辅助前列腺癌根治术”,即我们常说的“保留Retzius间隙的RARP”,并分享一些个人的浅见。这项技术自问世以来便备受关注,其理念和技术特点都值得我们深入探讨。我将从技术优势、难点和劣势这几个方面分享一下个人观点。
一、 核心优势:功能恢复快
后入路RARP最引人瞩目的优势,无疑体现在患者术后生活质量的快速恢复上,尤其是控尿功能和性功能。
1. 控尿功能恢复:
该术式的核心理念是“全盆底结构保全”。它从前列腺后方进入,完全避免了经前路手术时必须分离的膀胱前间隙(Retzius间隙),从而最大限度地保护了盆底支撑结构、耻骨前列腺韧带、膀胱颈以及重要的神经血管束前部。正因如此,手术对尿道外括约肌及其周围支撑结构的干扰降至最低。大量文献和临床实践表明,接受后入路手术的患者,其术后即刻尿控恢复率和短期尿控恢复率(如术后1周、1个月)显著优于传统前入路。很多患者甚至在拔除尿管当日或短期内就能实现良好的控尿,这极大地提升了患者的早期康复体验和信心。
2. 性功能恢复:
由于手术路径避开了膀胱前区,能够更早、更清晰地暴露前列腺尖部和后方的狄氏筋膜。这为实施更精准的、以筋膜间或筋膜内为基础的神经血管束保留技术提供了理想的解剖学基础。医生从前列腺后方着手更精细地分离和保护支配阴茎勃起的关键神经血管。对于术前性功能良好的患者,后入路为实现最大程度的神经保留创造了有利条件,从而有望获得更高的术后勃起功能恢复率和更快的恢复速度。
二、 技术难点:对术者提出了更高要求
尽管后入路优势明显,但我们绝不能忽视其后入路技术本身带来的挑战。
1. 视野与操作空间狭小:
这是后入路最大的特点,也是其难点所在。手术是在直肠前方与前列腺之间的狭小空间内开始着手,尤其对于骨盆狭窄、肥胖、肠道内容物多或前列腺体积较大的患者,初始的暴露和操作会非常困难。
2. 解剖标志的再认识:
术者需要从我们熟悉的膀胱前间隙解剖,切换到以直肠膀胱陷凹、狄氏筋膜、精囊腺和输精管为标志的“后方视角”。这种解剖思维的转换需要一个学习和适应过程。
3. 对术者技术要求高:
该术式并非初学RARP医生的首选。它要求术者必须具备扎实的机器人手术基本功,拥有出色的三维空间想象能力、熟练的器械操控技巧和在狭小空间内处理意外情况(如出血)的能力。可以说,这是一项为熟练掌握标准前入路RARP的医生准备的“进阶”技术。
三、 潜在劣势与争议:
1. 切缘阳性风险:
由于手术从后方开始,对于位于前列腺前部或尖前部的肿瘤,特别是当肿瘤侵犯包膜时,可能会增加前部切缘阳性的风险。这要求术前的影像学评估(多参数MRI或者PETCT)必须精准,以明确肿瘤位置,并在术中针对性地处理前列腺前部。
2. 依赖技术熟练度:
切缘的控制高度依赖于术者对后方解剖的熟悉程度和操作的精准性。在经验不足者手中,这种风险可能会被放大。
3. 对高危前列腺癌的适用性:
标准的后入路手术在完成前列腺切除后,再进行盆腔淋巴结清扫时,需要重新建立前入路的空间,这在一定程度上增加了手术步骤的复杂性。因此,对于高危、需要行扩大淋巴结清扫的患者,部分学者认为前入路或前后联合入路可能更具优势。
4. 局部侵犯的处理:
当肿瘤向后侵犯精囊腺或突破狄氏筋膜时,后入
总 结
总而言之,后入路机器人辅助前列腺癌根治术是一项极具创新性的技术。它以“结构保全”为核心,在改善患者术后生活质量,尤其是早期尿控方面,展现出了令人鼓舞的优势。然而,它并非完美,其陡峭的学习曲线和对前部切缘控制的挑战要求我们必须经过严格培训并谨慎选择病例。
王弘恺 教授
复旦大学附属肿瘤医院
复旦大学附属肿瘤医院泌尿外科副主任医师,泌尿外科主任助理;前列腺癌专病带组医生
上海市医师协会机器人专委会委员
上海市抗癌协会核医学专委会委员
中国抗癌协会男性生殖系统肿瘤专委会委员
中国医药教育协会医疗机器人发展促进分会副秘书长、常务委员
中国非公立医疗机构协会泌尿外科专业委员会委员
《中华外科杂志》通讯编委
《CACA前列腺癌指南》执笔专家
擅长机器人辅助前列腺癌根治术,保留神经的前列腺癌根治术,保留盆底结构的前列腺癌根治术
发表SCI论文18篇(一作、通讯),中文核心期刊论文3篇(一作),最高影响因子40.8
主持国家自然科学基金项目1项,参与多项
中国抗癌协会科技奖“一等奖”
中国抗癌协会“中国泌尿肿瘤微创手术杰出贡献奖”“中国泌尿肿瘤微创手术优秀奖”
国家卫健委新时代健康科普作品讲解类优秀奖获得者
上海医师协会“浦江U星”手术视频大赛获奖者
病例撰稿:王弘恺教授
排版:Lya
执行:Lya
本平台旨在为医疗卫生专业人士传递更多医学信息。本平台发布的内容,不能以任何方式取代专业的医疗指导,也不应被视为诊疗建议。如该等信息被用于了解医学信息以外的目的,本平台不承担相关责任。本平台对发布的内容,并不代表同意其描述和观点。若涉及版权问题,烦请权利人与我们联系,我们将尽快处理。
医脉通是专业的在线医生平台,“感知世界医学

(本网站所有内容,凡注明来源为“医脉通”,版权均归医脉通所有,未经授权,任何媒体、网站或个人不得转载,否则将追究法律责任,授权转载时须注明“来源:医脉通”。本网注明来源为其他媒体的内容为转载,转载仅作观点分享,版权归原作者所有,如有侵犯版权,请及时联系我们。)